C3 Robot Arm Control
Keywords: kinematics, dynamics, C, Linux, QNX
Overview
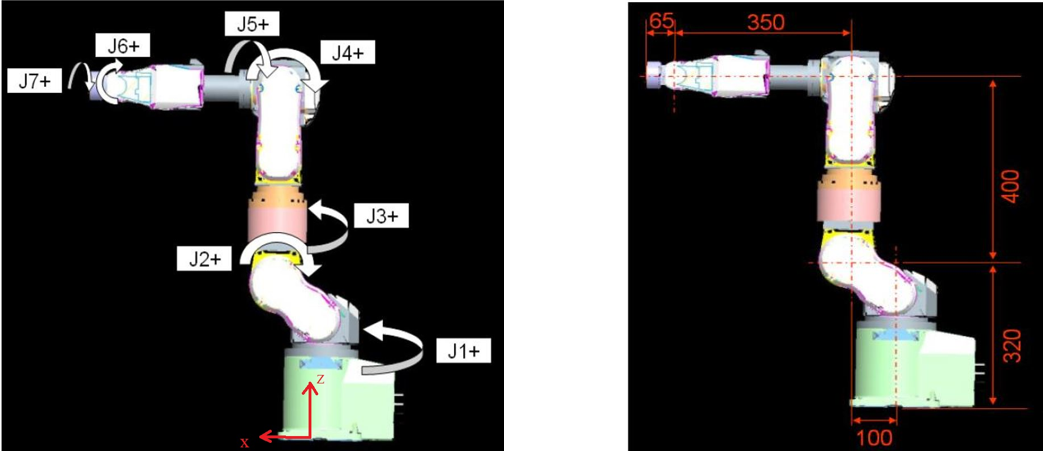
This project is aimed to control Epson C3 robot arm following a simple path like a circle and a line. In this project, I learned about basic robotics knowledge such as solving the forward and inverse kinematics, implementation of simple path planning, PD controller with gravity compensation, and Jacobian-based scheme control (Resolved Motion Rate Control) for a redundant manipulator (7-DOF robotics arm). On top of that, I also gain a deeper knowledge about linux, managing message between computer and robot using QNX, and integrating our own code from our computer to the robot controller.
Experiment
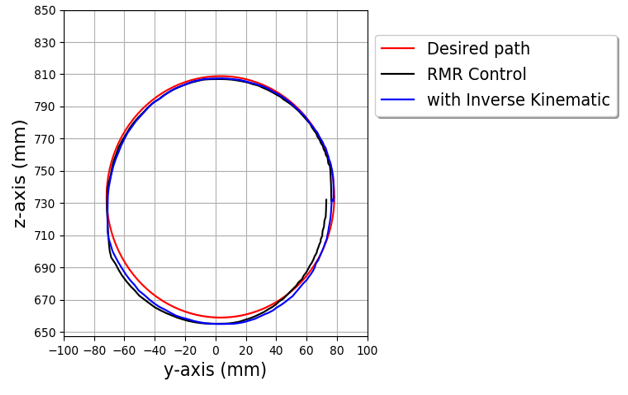
The following footage shows a demonstration where the robot follows a circle path with resolved motion rate control method.
Source Code :